Peripheral units in an event-driven system
Consider a system where one task uses an analog comparator while executing, but the task is suspended by a higher-priority task. Ideally, the comparator should be turned off when the task is suspended and then turned on again once the task is resumed. This would minimize the power being consumed during the execution of the high-priority task.
This is a schematic diagram of the power consumption of an assumed event-driven system where the system at the point of time t0 is in an inactive mode and the current is I0:
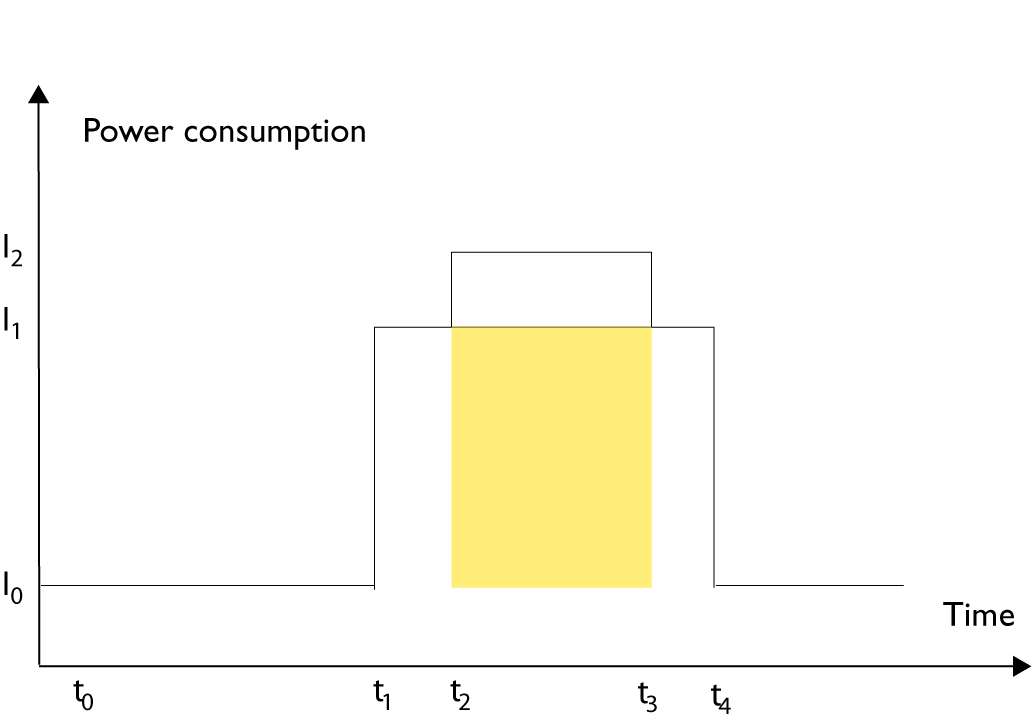
At t1, the system is activated whereby the current rises to I1 which is the system’s power consumption in active mode when at least one peripheral device turned on, causing the current to rise to I1. At t2, the execution becomes suspended by an interrupt which is handled with high priority. Peripheral devices that were already active are not turned off, although the task with higher priority is not using them. Instead, more peripheral devices are activated by the new task, resulting in an increased current I2 between t2 and t3 where control is handed back to the task with lower priority.
The functionality of the system could be excellent and it can be optimized in terms of speed and code size. But in the power domain, more optimizations can be made. The shadowed area represents the energy that could have been saved if the peripheral devices that are not used between t2 and t3 had been turned off, or if the priorities of the two tasks had been changed.
If you use the Timeline window, you can make a closer examination and identify that unused peripheral devices were activated and consumed power for a longer period than necessary. Naturally, you must consider whether it is worth it to spend extra clock cycles to turn peripheral devices on and off in a situation like in the example.